Fujitsu desarrolla una nueva tecnología para apoyar la colaboración entre humanos y robots
Empresa | Tecnología | 11/12/2025

Fujitsu anuncia el desarrollo de una nueva tecnología destinada a facilitar, hacer más segura y más eficiente la colaboración entre robots y seres humanos. La tecnología de spatial world model permite a la inteligencia artificial predecir los comportamientos y estados futuros de los distintos actores y objetos dentro de un espacio, y facilita una colaboración fluida entre personas y robots, así como una coordinación óptima entre robots. Este nuevo avance forma parte de los esfuerzos más amplios de investigación y desarrollo de Fujitsu en el ámbito de la physical AI.
La tecnología de spatial world model se presentará en CES 2026, que se celebrará en Las Vegas del 6 al 9 de enero de 2026. Fujitsu también tiene previsto llevar a cabo demostraciones técnicas en su sede central a lo largo del ejercicio fiscal 2026.
Características de la tecnología Spatial World Model
1.- Construcción de un modelo espacial del entorno mediante grafos de escena 3D centrados en las interacciones entre personas, robots y objetos
En los entornos físicos, la situación espacial cambia de forma dinámica a medida que los actores presentes en el espacio (es decir, personas, robots, etc.) se desplazan y actúan. Aunque se han explorado tecnologías que utilizan datos captados por cámaras para comprender estas dinámicas espaciales, las diferencias significativas en el campo de visión de cada cámara y las variaciones en la apariencia —como las distorsiones— entre cámaras fijas y móviles han dificultado su aplicación en tiempo real.
Por este motivo, en lugar de recurrir a una integración a nivel de píxel, altamente sensible a las diferencias de apariencia, Fujitsu ha desarrollado una tecnología que utiliza cámaras para evaluar el espacio a través de grafos de escena 3D; es decir, estructuras de datos jerárquicas que organizan todos los objetos del espacio físico como nodos dentro de un grafo. Este enfoque minimiza el impacto del campo de visión y la distorsión, lo que permite comprender en tiempo real entornos reales complejos y en constante cambio.
2.- Predicción de estados y comportamientos futuros mediante el modelado de las interacciones entre personas, robots y objetos
Para que humanos y robots puedan trabajar juntos de manera fluida, los robots deben ser capaces de comprender las intenciones que hay detrás de las acciones humanas y predecir su comportamiento futuro. Las tecnologías de world model que permiten a los robots anticipar cambios y actuar en su entorno inmediato están siendo ampliamente investigadas, pero hasta ahora se han limitado a modelar únicamente el entorno cercano, sin llegar a captar los cambios dinámicos que se producen en todo un espacio.
El nuevo método desarrollado por Fujitsu estima con precisión las intenciones de comportamiento interpretando las relaciones causales derivadas de las diversas interacciones entre actores y objetos dentro de un espacio. Al utilizar estos datos para predecir acciones futuras, la tecnología contribuye a evitar colisiones y a generar planes de acción cooperativos óptimos para múltiples robots autónomos.
En pruebas realizadas con conjuntos de datos académicos de referencia pública, se confirmó que esta tecnología puede mejorar hasta por tres la precisión en la estimación de intenciones de comportamiento [1].
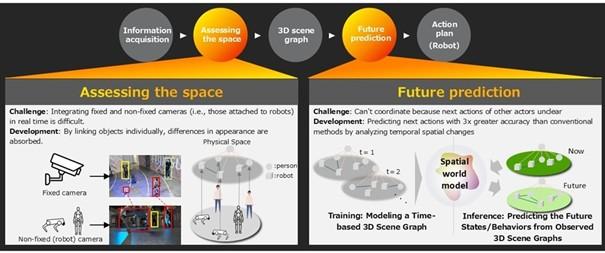
Figura: Diagrama de la tecnología spatial world model.
Contexto
La tecnología de IA, que hasta ahora se había desarrollado principalmente en entornos digitales, está comenzando a aplicarse a escenarios del mundo real. La physical AI es un ámbito de la inteligencia artificial en el que la IA se entrena para comprender las leyes físicas y actuar de forma autónoma, y desempeñará un papel clave en la resolución de diversos retos del mundo real, como la conducción autónoma o las fábricas inteligentes. Este enfoque está despertando un gran interés como posible vía para contribuir a paliar el creciente déficit de mano de obra en Japón y mejorar la productividad industrial.
Sin embargo, las aplicaciones actuales de la physical AI se limitan en gran medida a entornos estructurados con recorridos definidos, como plantas de fabricación o almacenes logísticos. En viviendas y oficinas, donde los movimientos humanos son menos predecibles y la disposición de los objetos cambia con frecuencia, resulta difícil que la IA evalúe las dinámicas espaciales, lo que hace que las soluciones actuales no sean prácticas. Además, en entornos en los que deben colaborar un gran número de personas y robots, la cooperación sigue siendo compleja, ya que la IA no es capaz de comprender las intenciones que hay detrás de los movimientos de los demás.
Esta nueva tecnología se basa en la tecnología de Computer Vision de Fujitsu, utilizada principalmente para el análisis del flujo de personas en instalaciones comerciales y la detección de comportamientos anómalos en la prevención del delito, así como en su tecnología de IA digital, incluido el Fujitsu Kozuchi AI Agent, que ejecuta tareas de forma autónoma junto a las personas. Forma parte de los esfuerzos de investigación del Spatial Robotics Research Center, que Fujitsu creó en abril de 2025 para reforzar su investigación con el objetivo de hacer realidad una nueva sociedad en la que humanos y robots convivan.
Nota
[1] JRDB-Social: Benchmark para la estimación del comportamiento humano y las intenciones a partir de imágenes captadas por cámaras.


